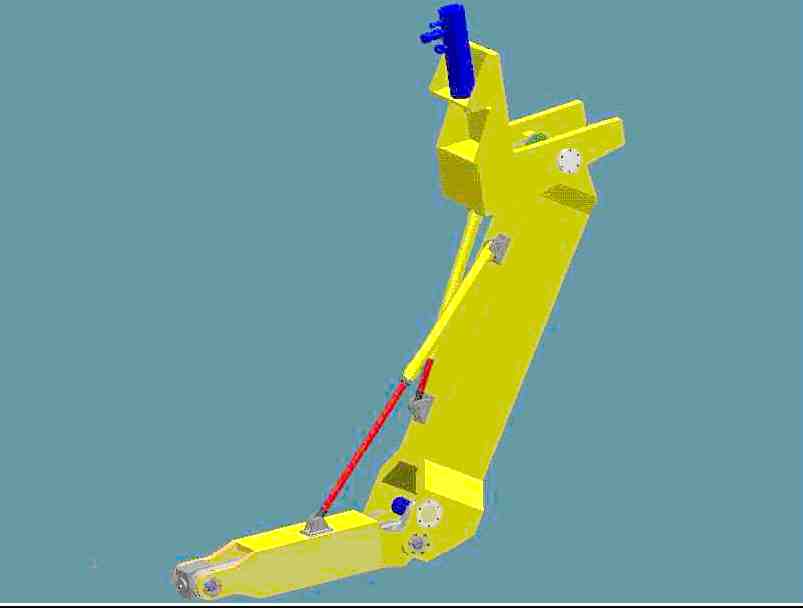
Il lavoro da noi svolto ha portato ad una rappresentazione tridimensionale del manipolatore nella quale si e` tenuto conto di tutti gli aspetti precedentemente accennati. Risolti i problemi incontrati abbiamo inoltre simulato il movimento del braccio nel rispetto dei vincoli cinematici.